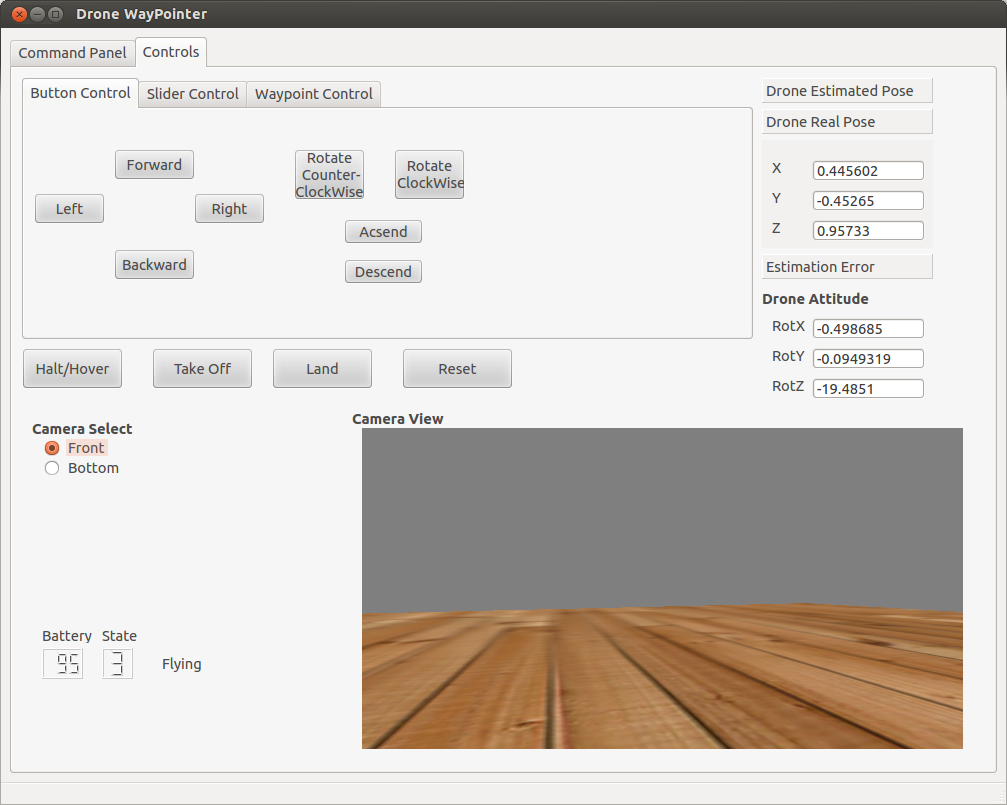
"Drone WayPointer" is a ROS package that provides a UI to allow for remote control of the Parrot AR Drone 2.0. It is developed in C++ with qt-ros and the Qt4 Development FrameWork. It is designed to work with the ROS - Fuerte and it uses the the ardrone_autonomy driver (Fuerte-devel Branch). It has so far only been tested on the tum_simulator and not on the actual drone. The main functionalities it provides is camera streams of front or bottom cameras of the drone, button and slider control of the drone XYZ velocities, control using waypoints and waypoint commands, pose estimation using simple dead-reckoning and measurement and image recording functionalities.
Project Samples




License
GNU General Public License version 3.0 (GPLv3)Follow Drone WayPointer
Other Useful Business Software
MongoDB Atlas runs apps anywhere
MongoDB Atlas gives you the freedom to build and run modern applications anywhere—across AWS, Azure, and Google Cloud. With global availability in over 115 regions, Atlas lets you deploy close to your users, meet compliance needs, and scale with confidence across any geography.
Rate This Project
Login To Rate This Project
User Reviews
Be the first to post a review of Drone WayPointer!
