Re: [Algorithms] Solving a system of line equations -- SimpleVersion ; )
Brought to you by:
vexxed72
|
From: metanet s. <met...@ya...> - 2008-12-08 21:57:53
|
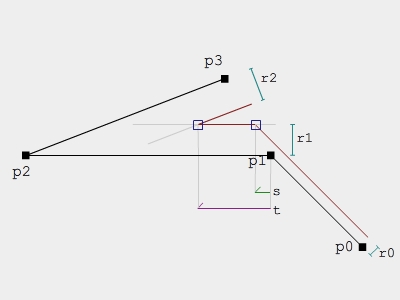
thanks! Right now I'm getting pretty good results by initializing all r = rMax and then solving the s<t constraints; the main problem with this is that each frame I have to start from scratch.. your idea sounds promising in that it will let me "warm start" things using the previous frame's solution. --- On Mon, 12/8/08, Patrick Betremieux <Pa...@li...> wrote: > From: Patrick Betremieux <Pa...@li...> > Subject: Re: [Algorithms] Solving a system of line equations -- SimpleVersion ; ) > To: "Game Development Algorithms" <gda...@li...> > Received: Monday, December 8, 2008, 1:30 PM > I see two problems with those two constraints being in the > same solver > pass. First, the two constraints are really opposite of > each other. And > since this problem has a range of solutions per segment, > and no local > minimum, you will likely get the solver to just ping pong > back and forth > around valid solutions. And if you run this as the user > moves a point, > you might very well get all the segments to randomly switch > between > valid solutions each frame. > > Since one of your constraints is softer then the other (s > < t is an > absolute, whereas r being close to rMax is just to make it > better), I > would just iteratively expand the r's one segment at a > time until they > all reach their max, or would cause s >= t. First > compute for all > segments by how much it could grow its r without causing > problems. Then > iteratively pick the segment that has the least room to > grow its r and > expand it as much as possible. Recompute the new growth > potential of the > two neighbours, and repeat until you've gone through > all the segments. > At least, this would have the benefit of giving you the > same answer each > time you run it, but you'd have to add some heuristic > for which solution > you're more interested in (Maximizing one r might make > another one > needing to be zero, which might not be good) > > Patrick. > > -----Original Message----- > From: metanet software [mailto:met...@ya...] > Sent: Friday, December 05, 2008 12:08 PM > To: gda...@li... > Subject: Re: [Algorithms] Solving a system of line > equations -- > SimpleVersion ; ) > > I've gotten the basic solver working, but I'm still > struggling with how > to deal with additional constraints, such as: > > -drive r[] values towards targets (minimize ||targ[i] - > r[i]||) > -enforce a minimum allowable r value (make sure r[i] > > rmin) > > Currently I'm adding these as additional constraints > the solver has to > deal with; this makes sense for enforcing the minimum > allowable value, > but it seems wrong to drive r[] values towards targets > using > constraints, since they almost always directly > "fight" with the main > constraints.. causing the solver to fail to converge to a > solution. > > Raigan > > > > --- On Fri, 12/5/08, metanet software > <met...@ya...> wrote: > > > From: metanet software <met...@ya...> > > Subject: [Algorithms] Solving a system of line > equations -- Simple > Version ; ) > > To: gda...@li... > > Received: Friday, December 5, 2008, 10:20 AM > > My first form of this question was needlessly obtuse, > this > > version should be much more comprehensible! > > > > I have the following system: > > http://www.harveycartel.org/raigan/system.jpg > > > > I'd like to solve for r0,r1,r2 such that s < t; > > obviously setting r0=r1=r2=0 is a trivial solution; > I'm > > more interested in driving r0,r1,r2 towards target > values > > r0max,r1max,r2max while maintaining the constraint s > < t. > > > > My current plan is to construct the constraint > equation C = > > s - t < 0 and then solve for the r values (by > calculating > > the partial derivatives of C wrt r[i] and doing a > > non-linear-least-squares fit as in > > > http://www.matthiasmueller.info/publications/posBasedDyn.pdf > > ). > > > > However even if this works, I have no idea how to > > simultaneously minimize (rmax[i] - r[i]), i.e how I > should > > drive the r values towards target values while obeying > C. > > > > Sorry for the totally obfuscated initial question.. > thanks > > for your time! > > > > Raigan > > > > p.s - Just in case it's not clear from the > diagram, s > > and t are the parametric times of intersection between > > lines; each line is parallel to a segment (p[i+1] - > p[i]) > > and passes through the point p[i] + r[i]*Perp(p[i+1] - > > p[i])/Len(p[i+1] - p[i]).. i.e each line is just a > > linesegment offset along its normal. > > > > > > > > > > > __________________________________________________________________ > > Looking for the perfect gift? Give the gift of Flickr! > > > > > http://www.flickr.com/gift/ > > > > > ------------------------------------------------------------------------ > ------ > > SF.Net email is Sponsored by MIX09, March 18-20, 2009 > in > > Las Vegas, Nevada. > > The future of the web can't happen without you. > Join > > us at MIX09 to help > > pave the way to the Next Web now. Learn more and > register > > at > > > http://ad.doubleclick.net/clk;208669438;13503038;i?http://2009.visitmix. > com/ > > _______________________________________________ > > GDAlgorithms-list mailing list > > GDA...@li... > > > https://lists.sourceforge.net/lists/listinfo/gdalgorithms-list > > Archives: > > > http://sourceforge.net/mailarchive/forum.php?forum_name=gdalgorithms-lis > t > > > > __________________________________________________________________ > Yahoo! Canada Toolbar: Search from anywhere on the web, and > bookmark > your favourite sites. Download it now at > http://ca.toolbar.yahoo.com. > > ------------------------------------------------------------------------ > ------ > SF.Net email is Sponsored by MIX09, March 18-20, 2009 in > Las Vegas, > Nevada. > The future of the web can't happen without you. Join > us at MIX09 to > help > pave the way to the Next Web now. Learn more and register > at > http://ad.doubleclick.net/clk;208669438;13503038;i?http://2009.visitmix. > com/ > _______________________________________________ > GDAlgorithms-list mailing list > GDA...@li... > https://lists.sourceforge.net/lists/listinfo/gdalgorithms-list > Archives: > http://sourceforge.net/mailarchive/forum.php?forum_name=gdalgorithms-lis > t > > ------------------------------------------------------------------------------ > SF.Net email is Sponsored by MIX09, March 18-20, 2009 in > Las Vegas, Nevada. > The future of the web can't happen without you. Join > us at MIX09 to help > pave the way to the Next Web now. Learn more and register > at > http://ad.doubleclick.net/clk;208669438;13503038;i?http://2009.visitmix.com/ > _______________________________________________ > GDAlgorithms-list mailing list > GDA...@li... > https://lists.sourceforge.net/lists/listinfo/gdalgorithms-list > Archives: > http://sourceforge.net/mailarchive/forum.php?forum_name=gdalgorithms-list __________________________________________________________________ Yahoo! Canada Toolbar: Search from anywhere on the web, and bookmark your favourite sites. Download it now at http://ca.toolbar.yahoo.com. |

{kind=link}