Thread: [Algorithms] (no subject)
Brought to you by:
vexxed72
|
From: Igor S. <igo...@mt...> - 2000-07-21 19:53:54
|
unsubscribe algorithms |
|
From: Matthew D. <MD...@ac...> - 2000-09-28 13:40:28
|
Hi, I have assembly code versions of sine, cosine and tangent functions but now I need arcsine, arccosine and arctangent functions, some of which are needed in my quaternion code. Can anyone provide references to how these can be implemented on the Pentium processor using the FPU? Regards, Matt Davies Programmer Acclaim Studios, Cheltenham +44 (0) 1242 533682 ICQ: 78711743 |
|
From: David B. <db...@bt...> - 2000-09-28 18:52:04
|
Look at fpatan and fsqrt, you should be able to impliment asin,atan and acos in terms of fpatan... You can get quite a bit more performance over compiler intrinsics or CRT functions. If you have a restricted input or can overlap parts. It may also be possible to use approximations of these functions(eg with polynomials), depending on your requirments. David http://www.dblack.btinternet.co.uk ICQ #: 24402391 Mobile: (UK) 0778 7836188 ----- Original Message ----- From: "Matthew Davies" <MD...@ac...> To: "Algorithms List (E-mail)" <gda...@li...> Sent: Thursday, September 28, 2000 2:39 PM Subject: [Algorithms] (no subject) > Hi, > > I have assembly code versions of sine, cosine and tangent functions but now > I need arcsine, arccosine and arctangent functions, some of which are needed > in my quaternion code. Can anyone provide references to how these can be > implemented on the Pentium processor using the FPU? > > Regards, > > > Matt Davies > Programmer > Acclaim Studios, Cheltenham > +44 (0) 1242 533682 > ICQ: 78711743 > _______________________________________________ > GDAlgorithms-list mailing list > GDA...@li... > http://lists.sourceforge.net/mailman/listinfo/gdalgorithms-list > |
|
From: Dave E. <eb...@ma...> - 2000-09-29 00:43:55
|
From: "Matthew Davies" <MD...@ac...> > I have assembly code versions of sine, cosine and tangent functions but now > I need arcsine, arccosine and arctangent functions, some of which are needed > in my quaternion code. Can anyone provide references to how these can be > implemented on the Pentium processor using the FPU? http://www.magic-software.com/MgcNumerics.html , files MgcFastFunction.{h,cpp} The code includes polynomial approximations for sin, cos, tan, atan, a couple of other approximations for atan, and approximations for asin and acos that involve polynomials multiplied by sqrt(1-x) for 0 <= x <= 1. This code alone ran 2.5 times faster than using calls to asin/acos, but it should be easy enough for you to swap out sqrt for your own Pentium-specific fast square root calculator. -- Dave Eberly eb...@ma... http://www.magic-software.com |
|
From: Pierre T. <p.t...@wa...> - 2000-09-29 06:02:38
|
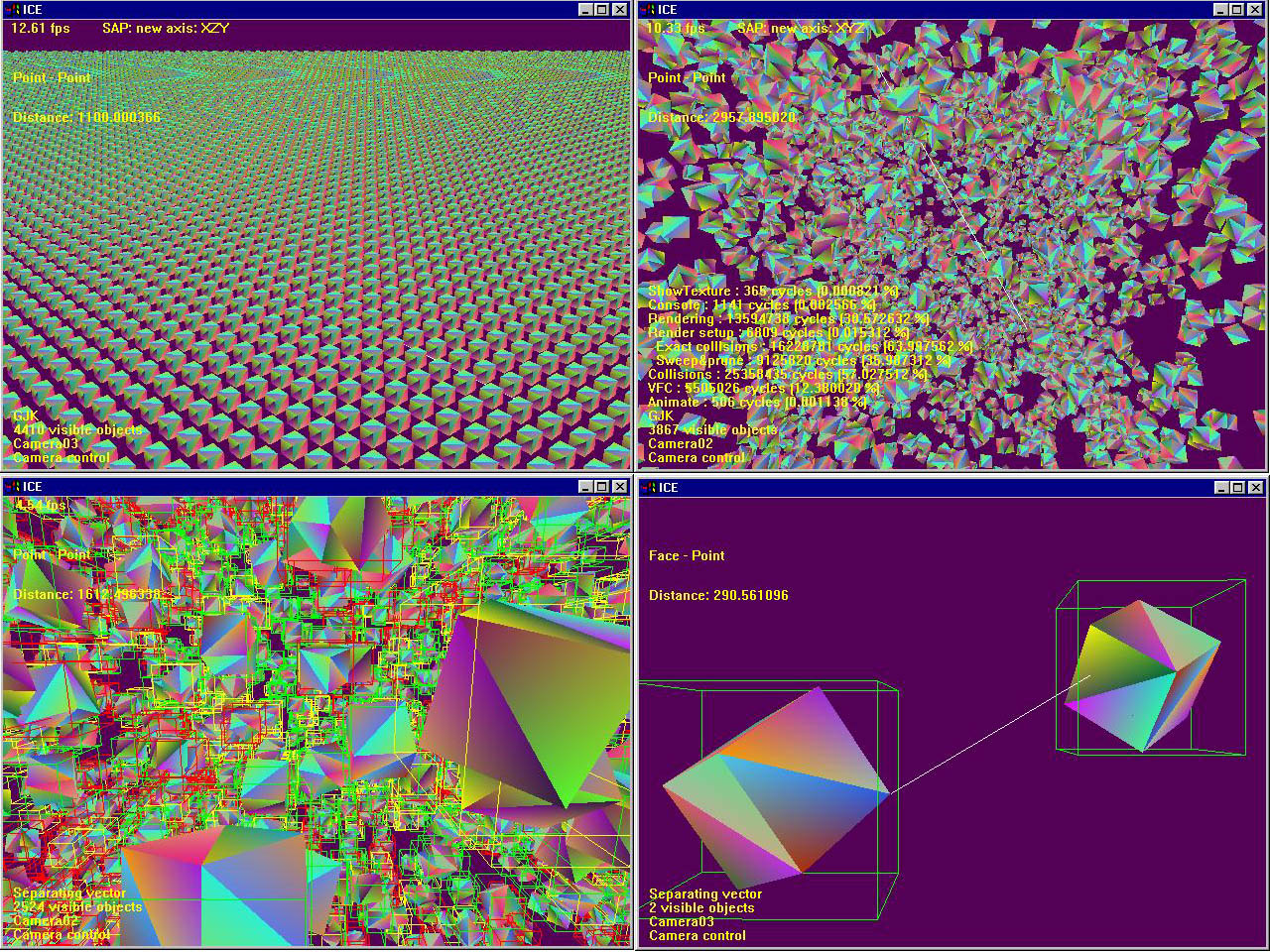
(This is a repost since the first one apparently never made it to the list... While I was at it I completed it :) Hi, The thread "Checking for duplicate vertices quickly" where I proposed to use the collision detection code to weld some 10K vertices gave birth to one or two interesting tests...................... Ever wondered what fun it was to detect exact collisions among 10.000 individual cubes? I tell you, it's a lot of pain. So let's push the enveloppe quite a bit: www.codercorner.com/CubeHell.jpg www.codercorner.com/CubeHell2.jpg AABBs are drawn on the second screenshot. Green = no collision Yellow = AABBs overlap but cubes do not collide Red = cubes are colliding Not all cubes are visible on the same screen, "only" ~3300, else you just can't see anything :) And yes it's "slow" (see the framerate in the corner but eh ...!! That's 10000 individual cubes colliding down to the triangle level ! This is absolutely useless and I know that, but it was so much fun to code I must share that one with the list! Note that for "only" 1024 cubes, it runs at ~70 fps on on Celeron 500, which is kind of cool regarding Chris Hecker and Jeff Lander's "stress" tests of physics engines, where 40 objects are said to be "a lot". The algorithms used are the standard ones: - sweep & prune - OBB tree - GJK - Separating vector ...so nothing special, except the implementation looks robust. I can change the collision detection method on the fly. Currently the fastest method is a mix of GJK+Separating vector, in a Q-Collide fashion. OBB "tree" is especially useless when the object is a single box, and hence it runs way slower than the two other algorithms. (about 6 times slower than the mixed GJK/SV, but this is a quite experimental OBB tree implementation where I decompress the tree on the f:ly, so the comparison may not be very fair!) Guess what? I love collision detection :) Cheers, Pierre |
|
From: David B. <db...@bt...> - 2000-09-29 10:55:06
|
> Ever wondered what fun it was to detect exact collisions among 10.000 > individual cubes? I tell you, it's a lot of pain. So let's push the > enveloppe quite a bit: > > www.codercorner.com/CubeHell.jpg > www.codercorner.com/CubeHell2.jpg > cool. > Note that for "only" 1024 cubes, it runs at ~70 fps on on Celeron 500, which > is kind of cool regarding Chris Hecker and Jeff Lander's "stress" tests of > physics engines, where 40 objects are said to be "a lot". I think the bottleneck for these test would be the contact force computation or integration stepsize (if penalty methods are being used etc). Not the collision detection and contact determination. > > The algorithms used are the standard ones: > - sweep & prune > - OBB tree > - GJK > - Separating vector > > ...so nothing special, except the implementation looks robust. > > I can change the collision detection method on the fly. > > Currently the fastest method is a mix of GJK+Separating vector, in a > Q-Collide fashion. OBB "tree" is especially useless when the object is a > single box, and hence it runs way slower than the two other algorithms. > (about 6 times slower than the mixed GJK/SV, but this is a quite > experimental OBB tree implementation where I decompress the tree on the > f:ly, so the comparison may not be very fair!) > > Guess what? I love collision detection :) I personally _HATE_ collision detection a lot. There are just too many special cases and it is difficult to get really accurate contact manifolds(not to mention debugging this)... But I love working on the other physics simulation problems:-) David http://www.dblack.btinternet.co.uk ICQ #: 24402391 Mobile: (UK) 0778 7836188 |
|
From: Matthew M. <ma...@me...> - 2000-09-29 16:41:29
|
> Guess what? I love collision detection :) You must not have any artists thrashing the special cases for you. Game artists have "collision special case" radar and will blow your coding confidence cache in the first ten frames of the simulation. I used to enjoy physics coding... :^( I think there's only three states for a collision system codebase: - simplistic - buggy - abandoned Uh oh...here comes Ron...run... Enjoy your cubes.... But seriously, great work. Gimme the code. ;^) |
|
From: Akbar A. <sye...@ea...> - 2000-09-29 21:11:31
|
heh, yeah i have always found this funny :) we think our code is solid, but we "protect" it :) :) :) then the art/other people come around and bash our stuff. guess it makes you think "diffrently" and forces us to code "those cases" peace. akbar A. you have "heard"; now read, www.beconvinced.com -----Original Message----- From: gda...@li... [mailto:gda...@li...]On Behalf Of Matthew MacLaurin Sent: Friday, September 29, 2000 11:41 AM To: gda...@li... Subject: RE: [Algorithms] Collision fun in cube hell > Guess what? I love collision detection :) You must not have any artists thrashing the special cases for you. Game artists have "collision special case" radar and will blow your coding confidence cache in the first ten frames of the simulation. I used to enjoy physics coding... :^( I think there's only three states for a collision system codebase: - simplistic - buggy - abandoned Uh oh...here comes Ron...run... Enjoy your cubes.... But seriously, great work. Gimme the code. ;^) _______________________________________________ GDAlgorithms-list mailing list GDA...@li... http://lists.sourceforge.net/mailman/listinfo/gdalgorithms-list |
|
From: Pierre T. <p.t...@wa...> - 2000-10-01 05:12:13
|
Ok, Interested people can download the demo here: www.codercorner.com/CubeHell.zip Pierre |
|
From: Pierre T. <p.t...@wa...> - 2000-10-08 14:20:11
|
New version for curious minds. http://www.codercorner.com/CubeHell.jpg http://www.codercorner.com/CubeHell.zip Press R for profiling information. Now you can choose the #cubes as well. (and check it actually runs with 10000 of them) Yeah, one more gloomy sunday. Pierre |
|
From: Pierre T. <p.t...@wa...> - 2000-09-29 20:15:20
|
> I think the bottleneck for these test would be the contact force computation > or integration stepsize (if penalty methods are being used etc). Not the > collision detection and contact determination. Certainly. I'm just pleased to see I have a lot of CPU time left to handle the rest of the story. > I personally _HATE_ collision detection a lot. There are just too many > special cases and it is difficult to get really accurate contact > manifolds(not to mention debugging this)... But I love working on the other > physics simulation problems:-) The main problem of "collision detection for dummies" is that there are a lot of papers and libs all around, and no global overview to help you out. You can read about SOLID, I-Collide, V-Clip, whatever, but I've never seen a paper explicitely telling the differences/common points between all the available libs and all the published methods. You must read all of them to start guessing. When I first had a look at CD some months ago now, I just didn't know where to start - I guess there are some mails in the archive with my first CD questions. My original goal was to do something like the Kano demo, but I got stuck in the CD part for quite a long time :) Now, I see the whole picture and I think I'll move to the next level - I still have your resting contact code to play with, but so far I've never really examined it. Was too early. BTW, don't you have a demo of your physics engine, or something? It must be quite cool now. What do you mean by "accurate contact manifolds", exactly? For the moment, the GJK part gives me the standard 4 contact figures (I know, you have a fifth one :), and I can use that to derive contact normals, impulses, and all the things needed to handle colliding contacts. I don't know if it's "enough". (I leave the resting contacts out of the way, I'd like all the other parts to be perfect before even thinking about resting contacts and quadratic programs.) Unfortunately, and as you know, the GJK algorithm only works for convex polytopes. So, for non-convex ones I'm stuck with OBB-trees, which can provide a list of colliding triangles, no more. I just don't know how to derive a correct distance function for non-convex meshes. So, when two non-convex meshes collide, I get the pair of colliding triangles, back up one frame, and computes the distance between those two triangles. Is this correct? Duno. The real closest-points, as computed by GJK, may lie somewhere else, anywhere. But since the collision can occur anywhere as well, it looks like the real distance function is not needed. Hmm, I also took some shortcuts which may hurt. When I get back in time in search of the exact collision time for non-convex meshes, I only do the CD on the two triangles whose collision has originally been detected, in order to save precious cycles of course. Does someone know if that's a valid move? Pierre |
|
From: <jo...@ci...> - 2000-10-17 12:38:10
|
Unsubscribe algorithms <jo...@ci...> |
|
From: kristian <fir...@ya...> - 2000-10-18 19:03:27
|
I want to fit a bspline sort of surface (i'm not picky, could be something else) to a grid of heightfield type data points. I'm starting with evenly spaced points, but don't want to restrict it to that. I want to get out something to fit triangles to, and that I can do modest collision checking with (nearest point on surface, above below surface). Isthis asking a lot? Anyone who can point me towards the math I need to do this? Web (i.e., free) resources are most appreciated. regards, kristian olivero __________________________________________________ Do You Yahoo!? Yahoo! Messenger - Talk while you surf! It's FREE. http://im.yahoo.com/ |
|
From: Graham S. R. <gr...@se...> - 2000-10-18 21:00:09
|
You might look into something called the minimum norm network (MNN), which I know nothing about except that it is used to do fit locally smooth surfaces to scattered data such as you describe. It may have some relationship with B-splines, but it is not the familiar B-spline representation and it does not require uniform spacing. Search the web! Graham Rhodes > -----Original Message----- > From: gda...@li... > [mailto:gda...@li...]On Behalf Of > kristian > Sent: Wednesday, October 18, 2000 3:03 PM > To: gda...@li... > Subject: [Algorithms] (no subject) > > > I want to fit a bspline sort of surface (i'm not > picky, could be something else) to a grid of > heightfield type data points. I'm starting with > evenly spaced points, but don't want to restrict it to > that. I want to get out something to fit triangles > to, and that I can do modest collision checking with > (nearest point on surface, above below surface). > Isthis asking a lot? > > Anyone who can point me towards the math I need to do > this? Web (i.e., free) resources are most appreciated. > > regards, > kristian olivero > > > __________________________________________________ > Do You Yahoo!? > Yahoo! Messenger - Talk while you surf! It's FREE. > http://im.yahoo.com/ > _______________________________________________ > GDAlgorithms-list mailing list > GDA...@li... > http://lists.sourceforge.net/mailman/listinfo/gdalgorithms-list > |
|
From: Max M. <amc...@an...> - 2000-10-19 03:17:01
|
You might want to check out some of Hugues Hoppe's eariler work; he did a lot with fitting b-spline surfaces to points. His web page is http://www.research.microsoft.com/~hoppe/ Max At 12:03 PM 10/18/00 -0700, you wrote: >I want to fit a bspline sort of surface (i'm not >picky, could be something else) to a grid of >heightfield type data points. I'm starting with >evenly spaced points, but don't want to restrict it to >that. I want to get out something to fit triangles >to, and that I can do modest collision checking with >(nearest point on surface, above below surface). >Isthis asking a lot? > >Anyone who can point me towards the math I need to do >this? Web (i.e., free) resources are most appreciated. > >regards, >kristian olivero > > >__________________________________________________ >Do You Yahoo!? >Yahoo! Messenger - Talk while you surf! It's FREE. >http://im.yahoo.com/ >_______________________________________________ >GDAlgorithms-list mailing list >GDA...@li... >http://lists.sourceforge.net/mailman/listinfo/gdalgorithms-list |
|
From: David H. <da...@hu...> - 2000-10-19 10:37:17
|
So long as the grid is regular this should be pretty easy - for =
non-uniform grids you either need to somehow make the grid uniform again =
or use something else. Uniform in this sense doesn't mean the vertices =
are distributed evenly in space merely that they are connected together =
in the form of a grid.
Given a subsection of the surface defined by a 4x4 block of vertices
[p00,p01,p02,p03]
[p10,p11,p12,p13]
[p20,p21,p22,p23]
[p30,p31,p32,p33]
to interpolate a new point on the surface in the centre square
[p11,p12]
[p21,p22]
at u,v where u and v vary between 0 and 1 and (0,0) is at p11 and (1,1) =
is at p22.
Q(u,v)=3D [B0(u),B1(u),B2(u),B3(u)][p00,p01,p02,p03][B0(v)]
[p10,p11,p12,p13][B1(v)]
[p20,p21,p22,p23][B2(v)]
[p30,p31,p32,p33][B3(v)]
Where=20
B0(x)=3D(1-x)^3/6 =20
B1(x)=3D(3*x^3-6*x^2+4)/6 =20
B2(x)=3D(-3*x^3+3*x^2+3*x+1)/6
b3(x)=3Dx^3/6 =20
The B?(x) functions are called the basis functions and as x is confined =
to [0..1] can be precalculated to some resolution eg. 1/100ths and =
stored in a table.=20
So for a trivial example u,v=3D(0,0)
B0(u)=3D1/6 B0(v)=3D1/6
B1(u)=3D4/6 B1(v)=3D4/6
B2(u)=3D1/6 B2(v)=3D1/6
B3(u)=3D0 B3(v)=3D0
Q(u,v)=3D[1/6,4/6,1/6,0][p00,p01,p02,p03][1/6]
[p10,p11,p12,p13][4/6]
[p20,p21,p22,p23][1/6]
[p30,p31,p32,p33][0]
Thats a BSpline. Something to bear in mind is that this derivation of =
the basis functions can only be used to interpolate over the period =
between the 2nd and 3rd vertices in either direction. So to interpolate =
over
p22,p23
p32,p33
for instance requires we make a new point matrix with p11 at the top =
left. One side effect of this is that we loose one row/column of patch =
squares off each edge of the full grid - this is countered by either 1/ =
Enlarging the full grid by 1 invisible vertex in each +/- direction =
which is commonly done by graphics packages. 2/ Wrapping the edges to =
form a cylinder/sphere 3/ Deriving a new set of basis functions defined =
over the periods between the 1st to 2nd and 3rd to 4th sections.
BSplines behave quite nicely but are very unlikely to actually pass =
through the vertices defining them. Catmull Rom (untensioned Cardinals) =
actually pass through all control vertices and behave well until you =
really start to fold the surfaces back on themselves when they start to =
bulge.
For Catmull Rom swap the basis functions above with
B0(x)=3D(-x^3+2x^2-x)/2
B1(x)=3D(3x^3-5x^2+2)/2
B2(x)=3D(-3x^3+4x^2+x)/2
B3(x)=3D(x^3-x^2)/2
Don't know if this helps.
David Hunt=20
----- Original Message -----=20
From: kristian <fir...@ya...>
To: <gda...@li...>
Sent: Wednesday, October 18, 2000 8:03 PM
Subject: [Algorithms] (no subject)
> I want to fit a bspline sort of surface (i'm not
> picky, could be something else) to a grid of
> heightfield type data points. I'm starting with
> evenly spaced points, but don't want to restrict it to
> that. I want to get out something to fit triangles
> to, and that I can do modest collision checking with
> (nearest point on surface, above below surface).=20
> Isthis asking a lot?
>=20
> Anyone who can point me towards the math I need to do
> this? Web (i.e., free) resources are most appreciated.
>=20
> regards,
> kristian olivero
>=20
>=20
> __________________________________________________
> Do You Yahoo!?
> Yahoo! Messenger - Talk while you surf! It's FREE.
> http://im.yahoo.com/
> _______________________________________________
> GDAlgorithms-list mailing list
> GDA...@li...
> http://lists.sourceforge.net/mailman/listinfo/gdalgorithms-list
|
|
From: Pai-Hung C. <pa...@ac...> - 2000-10-24 01:01:24
|
This is a test mail. |
|
From: Jornei A V. <jv...@on...> - 2001-02-22 04:22:41
|
remove |
|
From: Alexander R. <ale...@md...> - 2001-07-25 15:59:48
|
Hi All I have two question about octree (kd-tree) implementation 1. When I make octree, i need split some tris on codes border, or make ref. counter for every triangle. But I render block tringles, no one. I and can't check every triangle, and I can't check block, this make some errors. Example: we have 2 nodes 1st node have tri-block with texture A and tri-block with texture B 2nd node also have tri-block with texture A and tri-block with texture C Some triangles with texture A cross adjacent nodes borders. I don't see any solve for this case, except split tringales. 2. May be anybody use c-buffer for oclussion culling. As I understand c-buffer, this is software render single pass without texturing. I'am right ? imho with modern video card this method make render more _slower_, not faster. We can simple render all octree nodes with frustum culling and this would be more faster. May be exists other methods for octree oclussion culling for modern video cards i.e GeForce. Any ideas ? Thanks for reply. Radchenko Alexander, Programmer, Media Art mailto ale...@md... ICQ 109707188 |
|
From: ÌÆÌÎ <t_m...@26...> - 2001-07-30 23:47:53
|
__________________________________________ DVD´óƬ£¬Ò»ÂÉ10Ôª http://shopping.263.net/category02.htm ÃÀÈÝÑøÑÕ¡¢¼õ·ÊÊÝÉíÃؾ÷ http://shopping.263.net/category10.htm |
|
From: ÌÆÌÎ <t_m...@26...> - 2001-08-03 00:28:48
|
> >__________________________________________ > >DVD´óƬ£¬Ò»ÂÉ10Ôª http://shopping.263.net/category02.htm >ÃÀÈÝÑøÑÕ¡¢¼õ·ÊÊÝÉíÃؾ÷ http://shopping.263.net/category10.htm > > > > > >_______________________________________________ >GDAlgorithms-list mailing list >GDA...@li... >http://lists.sourceforge.net/lists/listinfo/gdalgorithms-list > __________________________________________ DVD´óƬ£¬Ò»ÂÉ10Ôª http://shopping.263.net/category02.htm ÃÀÈÝÑøÑÕ¡¢¼õ·ÊÊÝÉíÃؾ÷ http://shopping.263.net/category10.htm |
|
From: Mark A. <MA...@ac...> - 2001-09-14 11:35:26
|
Does anybody know of any good resources on the web that explain to an artist the best ways of building models so that they maximise triangle strip lengths? Or any good books? Please remember that I'm looking for something that I can hand over to an artist, so minimal techno-babble please. Cheers, Mark Allen |
|
From: Odin J. <od...@ps...> - 2001-09-14 12:39:58
|
Is GeForce the only card to support cube maps? (In both GL and DX) Odin -----Original Message----- From: gda...@li... [mailto:gda...@li...] On Behalf Of Mark Allen Sent: 14. september 2001 13:37 To: 'gda...@li...' Subject: [Algorithms] (no subject) Does anybody know of any good resources on the web that explain to an artist the best ways of building models so that they maximise triangle strip lengths? Or any good books? Please remember that I'm looking for something that I can hand over to an artist, so minimal techno-babble please. Cheers, Mark Allen _______________________________________________ GDAlgorithms-list mailing list GDA...@li... https://lists.sourceforge.net/lists/listinfo/gdalgorithms-list |
|
From: Paul F. <pf...@at...> - 2001-09-14 13:04:48
|
Odin Jensen wrote: > Is GeForce the only card to support cube maps? (In both GL and DX) What I'd like to know is how much slower a cube-mapped surface is to render than a single textured surface? Surely it would be six times slower since it has to render the object six times? Cheers, Paul. |
|
From: Odin J. <od...@ps...> - 2001-09-14 13:14:02
|
Well. If you specify 6 textures, it's rather fast. For true environment reflection, you have to render the scene 6 times into the texture. The speed of that really depends on your card. On GeForce3 it's quite fast, but I haven't put it into our game yet. I'll post some timings once it's done, since the engine can fallback to a normal environment map if the hardware doesn't support it or the user turns it off. Odin -----Original Message----- From: gda...@li... [mailto:gda...@li...] On Behalf Of Paul Firth Sent: 14. september 2001 15:06 To: gda...@li... Subject: Re: [Algorithms] Cubemap support Odin Jensen wrote: > Is GeForce the only card to support cube maps? (In both GL and DX) What I'd like to know is how much slower a cube-mapped surface is to render than a single textured surface? Surely it would be six times slower since it has to render the object six times? Cheers, Paul. _______________________________________________ GDAlgorithms-list mailing list GDA...@li... https://lists.sourceforge.net/lists/listinfo/gdalgorithms-list |
{kind=link}
{kind=link}